Wer schon einmal versucht hat, ein komplexes Robotik-Projekt mit einem Standard-Uno zu realisieren, kennt diesen Moment der Frustration. Man zählt die verfügbaren Anschlüsse und stellt fest: Es reicht hinten und vorne nicht. Genau hier kommt das Arduino Mega 2560 Pin Diagram ins Spiel, denn dieses Board ist das Arbeitstier für alle, die mehr wollen als nur eine blinkende LED. Mit 54 digitalen Ein- und Ausgängen bietet diese Plattform eine Flexibilität, die Einsteiger oft unterschätzen. Ich habe selbst Nächte damit verbracht, Kabelbäume für 3D-Drucker-Steuerungen zu löten, nur um festzustellen, dass ich die Hardware-Serial-Pins falsch zugeordnet hatte. Solche Fehler kosten Zeit und Nerven. Wer das Layout des ATmega2560-Chips im Detail beherrscht, baut stabilere Systeme.
Warum die Pinbelegung über Erfolg oder Misserfolg entscheidet
Ein Blick auf das Board zeigt eine beeindruckende Menge an Buchsenleisten. Aber Vorsicht ist geboten. Nicht jeder Pin kann alles. Viele Anfänger denken, man könne einfach jeden Sensor irgendwo einstecken. Das ist ein Irrglaube. Die Hardware-Architektur des Mega-Boards ist spezifisch gruppiert. Wir haben es hier mit einem 8-Bit-Mikrocontroller zu tun, der deutlich mehr Register verwalten muss als seine kleineren Geschwister. Das bedeutet auch, dass die Stromaufnahme pro Pin begrenzt ist. Wer zu viele stromhungrige Komponenten direkt über den Controller versorgt, grillt das Board schneller, als er "Kurzschluss" sagen kann. In ähnlichen Meldungen schauen Sie: Space X Erreicht Neue Meilensteine Bei Der Kommerziellen Nutzung Des Weltraums.
Die Macht der digitalen I/O-Pins
Von den 54 digitalen Pins sind 15 für die Pulsweitenmodulation (PWM) reserviert. Das ist wichtig für die Steuerung von Motoren oder das Dimmen von LEDs. Wenn du einen Hexapod-Roboter baust, brauchst du genau diese PWM-Fähigkeit für jedes einzelne Servo. Ich nutze bei meinen Projekten oft die Pins 2 bis 13, da diese am einfachsten zu erreichen sind. Aber die Erweiterung bis Pin 53 erlaubt es, riesige LED-Matrizen ohne externe Schieberegister anzusteuern. Man muss sich klarmachen, dass jeder dieser Pins intern mit einem Pull-up-Widerstand ausgestattet ist, den man per Software aktivieren kann. Das spart externe Bauteile auf dem Breadboard.
Analoge Eingänge für präzise Messungen
Während der Uno nur sechs analoge Eingänge hat, klotzt der Mega mit 16 Kanälen. Diese sind mit A0 bis A15 beschriftet. In der Praxis bedeutet das, dass du eine komplette Wetterstation mit Sensoren für Temperatur, Feuchtigkeit, Licht, Windgeschwindigkeit und Luftdruck bauen kannst und immer noch Pins übrig hast. Die Auflösung beträgt 10 Bit. Das ergibt 1024 verschiedene Werte. Für die meisten Hobby-Anwendungen reicht das völlig aus. Wenn ich jedoch hochpräzise Waagen baue, greife ich meist zu einem externen ADC, da das Rauschen auf dem Mega-Board bei voller Pin-Belegung zunehmen kann. Ergänzende Einordnung von CHIP vertieft vergleichbare Perspektiven.
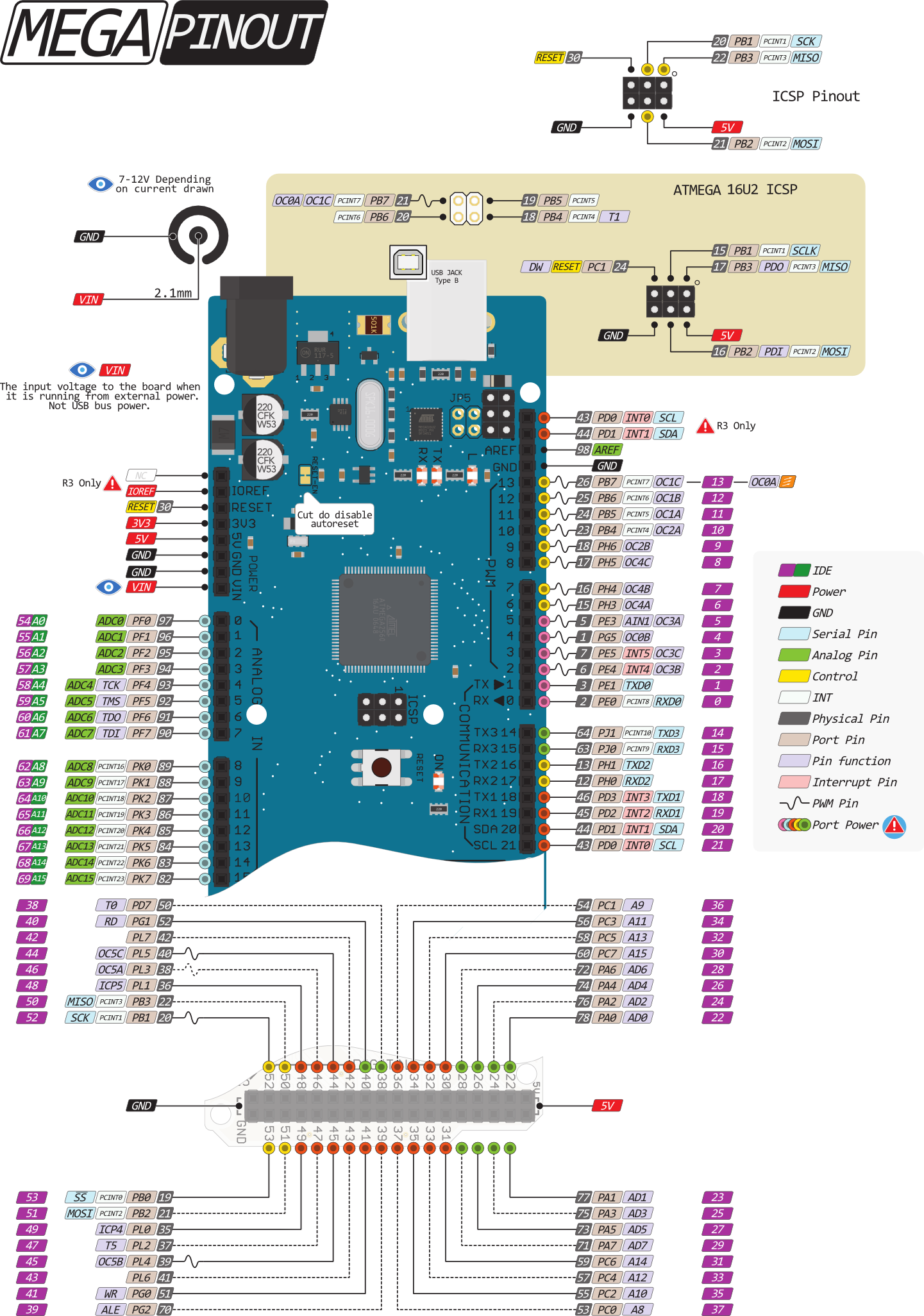
Das Arduino Mega 2560 Pin Diagram im Detail erklärt
Wenn man sich das offizielle Arduino Mega 2560 Pin Diagram ansieht, erkennt man sofort die farbliche Codierung der verschiedenen Funktionen. Es ist das wichtigste Werkzeug in deiner Werkstatt. Ohne diese Übersicht arbeitest du blind. Die physische Anordnung der Pins auf der Platine entspricht nicht immer der internen Logik des Mikrocontrollers. Das kann verwirrend sein. Beispielsweise liegen die Kommunikations-Pins für I2C ganz woanders als beim Uno. Das hat schon so manchen Shield-Nutzer zur Verzweiflung gebracht, weil die Steckverbindungen plötzlich nicht mehr passten.
Die seriellen Schnittstellen für Profis
Einer der größten Vorteile dieses Boards sind die vier Hardware-Serial-Ports. Das ist purer Luxus. An Serial 0 (Pins 0 und 1) hängt normalerweise der USB-Anschluss für das Debugging am PC. Aber du hast noch Serial 1, Serial 2 und Serial 3. Ich habe das oft genutzt, um gleichzeitig ein GPS-Modul, ein GSM-Shield und ein Nextion-Display auszulesen. Ohne diese zusätzlichen Ports müsstest du auf Software-Serial ausweichen, was den Prozessor belastet und bei hohen Baudraten instabil wird. Hier zeigt der Mega seine wahre Stärke im Multitasking.
Kommunikation über SPI und I2C
Für die Kommunikation mit SD-Karten-Modulen oder Ethernet-Shields brauchst du den SPI-Bus. Beim Mega liegen diese Pins auf 50 (MISO), 51 (MOSI), 52 (SCK) und 53 (SS). Das ist ein kritischer Punkt. Viele Tutorials im Netz beziehen sich auf den Uno, wo diese Signale auf den Pins 11 bis 13 liegen. Steckst du ein altes Shield auf den Mega, wird es ohne Anpassung der Pins im Code oder kleine Brücken auf der Hardware nicht funktionieren. I2C findest du auf den Pins 20 (SDA) und 21 (SCL). Es gibt zudem dedizierte Header für diese Protokolle, die man nutzen sollte, um Ordnung im Gehäuse zu halten.
Stromversorgung und Schutzmechanismen
Man kann das Board über USB oder den DC-Hohlstecker betreiben. Der eingebaute Spannungsregler macht aus 7 bis 12 Volt die benötigten 5 Volt. Aber Vorsicht: Der Regler wird heiß. Wenn du 12 Volt einspeist und viele Komponenten über den 5V-Pin des Boards versorgst, schaltet der Regler wegen Überhitzung ab oder brennt durch. Ich empfehle bei größeren Projekten immer eine externe Stromquelle. Ein einfacher 5V-Buck-Converter wirkt Wunder. Er entlastet den Arduino und sorgt für ein stabiles System.
Die Bedeutung der Ground-Pins
Masse ist nicht gleich Masse. Auf dem Board gibt es mehrere GND-Anschlüsse. Es ist klug, diese strategisch zu verteilen. Wenn ich analoge Sensoren verwende, versuche ich, deren Masse direkt an den Pin neben den analogen Eingängen zu legen. Das reduziert Störungen durch digitale Schaltsignale. Es klingt banal, aber eine saubere Masseführung ist oft der Unterschied zwischen einem Sensorwert, der springt, und einem, der wie ein Brett steht.
Reset und Schutzschaltungen
Der Reset-Pin zieht den Controller auf Null. Das ist nützlich für externe Taster am Gehäuse. Was viele nicht wissen: Es gibt eine Polyfuse auf dem Board. Diese schützt deinen Computer-USB-Port vor Kurzschlüssen. Wenn du mehr als 500 mA ziehst, unterbricht sie die Verbindung. Das hat mir schon mehr als einmal das Mainboard meines Laptops gerettet, wenn ich beim Basteln mit dem Schraubenzieher abgerutscht bin.
Praktische Anwendung in komplexen Projekten
Stell dir vor, du baust eine CNC-Fräse. Du brauchst drei Endstopps, drei Schrittmotortreiber, eine Spindelsteuerung, ein Display und vielleicht noch eine Handsteuerung. Mit einem kleinen Controller kommst du da schnell an die Grenzen. Das Layout des Mega erlaubt es dir, diese Komponenten sauber zu trennen. Ich lege die Motortreiber meist auf die hintere Pin-Leiste (Pins 22 bis 53). Das hält die kurzen Kabelwege zu den Treibern übersichtlich und lässt die PWM-Pins für die Spindel oder Lüfter frei.
Interrupts für schnelle Reaktionen
Manchmal muss der Controller sofort reagieren. Ein Not-Aus-Schalter oder ein Encoder-Signal darf nicht warten, bis die Hauptschleife des Programms einmal durchgelaufen ist. Der Mega verfügt über sechs externe Interrupts. Diese liegen auf den Pins 2, 3, 18, 19, 20 und 21. Wenn du einen 3D-Drucker programmierst, sind diese Pins Gold wert. Sie fangen Signale in Mikrosekunden ab. Das ist viel effizienter als permanentes Polling im Code.
Speicherplatz für große Bibliotheken
Mit 256 KB Flash-Speicher ist der Mega ein Riese. Ein Uno hat gerade mal 32 KB. Wenn du Bibliotheken für Grafik-Displays oder komplexe mathematische Berechnungen lädst, ist der kleine Speicher sofort voll. Ich habe Projekte gesehen, bei denen allein die Schriftarten für ein OLED-Display 40 KB verschlungen haben. Auf dem Mega lachst du darüber. Du kannst hunderte Zeilen Code schreiben, ohne jemals auf die Speicheranzeige in der IDE schielen zu müssen. Auch der RAM ist mit 8 KB deutlich großzügiger bemessen, was Abstürze durch Speicherüberlauf verhindert.
Häufige Fehler bei der Nutzung des Mega 2560
Trotz der vielen Möglichkeiten gibt es Stolperfallen. Die physische Größe des Boards ist ein Nachteil in engen Gehäusen. Zudem ist der Prozessor immer noch ein 8-Bit-Chip mit 16 MHz. Er ist nicht schneller als ein Uno. Wenn du also glaubst, der Mega würde deine Berechnungen beschleunigen, wirst du enttäuscht sein. Er bietet nur mehr Platz und mehr Anschlüsse. Wer Rechenpower sucht, muss eher Richtung ESP32 oder Arduino Due schauen.
Inkompatibilität mit Shields
Das ist das größte Ärgernis. Viele Shields für den Uno decken beim Mega die zusätzlichen Pins ab, nutzen sie aber nicht. Schlimmer noch: Die Belegung der SPI-Pins verhindert, dass Standard-Ethernet-Shields ohne "ICSP-Header-Verbindung" funktionieren. Achte beim Kauf von Zubehör immer darauf, ob es explizit als Mega-kompatibel gekennzeichnet ist. Die offizielle Dokumentation bei Arduino gibt hier oft Aufschluss über die feinen Unterschiede in der Hardware-Revision.
Die Lastgrenzen der Ports
Ein wichtiger Punkt, den man im Arduino Mega 2560 Pin Diagram oft übersieht: Die Pins sind in Gruppen (Ports) organisiert. Port A, Port B und so weiter. Jede dieser Gruppen hat ein maximales Stromlimit. Wenn du an alle Pins eines Ports gleichzeitig 20 mA hängst, überlastest du die internen Leiterbahnen des Chips. Ich habe das bei einer LED-Matrix schmerzhaft gelernt. Die Lösung ist einfach: Verteile die Last über verschiedene Bereiche des Boards. Nutze Transistoren oder MOSFETs für alles, was mehr als ein paar Milliampere zieht.
Tipps für effizientes Prototyping
Wenn ich ein neues Projekt starte, drucke ich mir das Pin-Layout groß aus und klebe es an die Wand über meinem Arbeitsplatz. Es spart das ständige Suchen am Bildschirm. Zudem markiere ich mir belegte Pins im Code mit klaren Kommentaren. Ein const int motorPin = 22; ist Pflicht. Benutze niemals direkt Zahlen im Code wie digitalWrite(22, HIGH);. Du wirst nach drei Wochen nicht mehr wissen, was an Pin 22 hängt.
Die Bedeutung der ICSP-Header
Mitten auf dem Board sitzt ein kleiner 6-poliger Block. Das ist der In-Circuit Serial Programming Header. Er ist direkt mit dem SPI-Bus verbunden. Viele moderne Shields nutzen nur diesen Header für die Kommunikation, weil er beim Uno und Mega an der gleichen Stelle sitzt. Wenn du eigene Platinen entwirfst, solltest du diesen Standard übernehmen. Es macht deine Hardware universeller einsetzbar.
Fehlerdiagnose leicht gemacht
Wenn ein Pin nicht das tut, was er soll, messe ich zuerst die Spannung direkt am Board. Oft ist es nur ein lockeres Jumper-Kabel im Breadboard. Die Qualität dieser Billig-Kabel aus Übersee ist oft unterirdisch. Ich bin dazu übergegangen, für wichtige Verbindungen starre Schaltdrähte zu biegen. Das sieht ordentlicher aus und minimiert Wackelkontakte. Ein Oszilloskop hilft zudem ungemein, wenn man PWM-Signale oder die Kommunikation auf dem I2C-Bus prüfen will. Es gibt günstige USB-Varianten, die für Audiofrequenzen und einfache Logiksignale völlig ausreichen.
Vergleich mit anderen Plattformen
Warum nicht gleich ein Raspberry Pi? Nun, der Arduino ist ein Echtzeit-System. Es gibt kein Betriebssystem, das plötzlich beschließt, ein Update zu machen oder den Prozessor für Hintergrundaufgaben zu beanspruchen. Wenn du einen Befehl schreibst, wird er genau in diesem Taktzyklus ausgeführt. Für die Steuerung von Hardware ist das essentiell. Ein Raspberry Pi ist toll für Datenbanken oder Webserver, aber für das präzise Schalten von Ventilen oder Motoren ist der Mega die bessere Wahl. Er ist robuster gegenüber Fehlbedienungen und verzeiht auch mal eine falsche Spannung für Bruchteile von Sekunden.
Langfristige Stabilität
Ich habe Mega-Boards in Außeninstallationen im Einsatz, die seit drei Jahren ohne Reboot laufen. Die Hardware ist extrem zuverlässig, solange sie vor Feuchtigkeit geschützt wird. In der Industrie sieht man oft den SPS-Ersatz auf Basis von Mikrocontrollern, wenn es um einfache Steuerungsaufgaben geht. Der Mega 2560 ist hier aufgrund seiner weiten Verbreitung und der riesigen Community eine sichere Bank. Man findet für fast jedes Problem eine Lösung in einem Forum.
Die Kostenfrage
Klar, ein originaler Mega kostet um die 40 Euro. Es gibt Klone für einen Bruchteil des Preises. Meiner Erfahrung nach funktionieren die Klone meist gut, aber oft sparen sie am USB-zu-Seriell-Chip. Statt des teuren Atmega16U2 verwenden sie den CH340. Dafür musst du unter Windows oft extra Treiber installieren. Wer professionell arbeitet oder Tutorials erstellt, sollte zum Original greifen, um sicherzugehen, dass alles "out of the box" funktioniert. Die Verarbeitungsqualität der Lötstellen ist beim Original meist auch einen Tick besser.
Nächste Schritte für dein Projekt
Nachdem du dich nun mit der Theorie befasst hast, solltest du praktisch werden. Theorie ohne Lötzinn ist wie ein Auto ohne Benzin. Hier ist dein Fahrplan für die nächsten Stunden:
- Drucke dir ein hochauflösendes Pin-Diagramm aus und markiere die PWM- und Kommunikations-Pins farbig.
- Besorge dir ein Multimeter und miss die Spannung an den 5V- und 3.3V-Pins, während du verschiedene Lasten anschließt. Das gibt dir ein Gefühl für die Stabilität deines Boards.
- Schreibe ein kleines Testprogramm, das nacheinander alle digitalen Pins ansteuert. Ein einfacher LED-Tester hilft dir, defekte Pins an gebrauchten Boards sofort zu identifizieren.
- Experimentiere mit den verschiedenen seriellen Schnittstellen. Verbinde zwei Arduinos miteinander und lass sie Daten austauschen. Das ist die Grundlage für jedes größere System.
- Plane deine Stromversorgung. Überlege genau, wie viel Milliampere deine gesamte Hardware zieht und ob der interne Regler das schafft.
Wer diese Schritte befolgt, wird schnell merken, dass der Mega 2560 trotz seines Alters ein absolut konkurrenzfähiges Werkzeug ist. Er ist das Rückgrat der Maker-Bewegung und wird es auch noch lange bleiben. Es gibt kaum ein Problem, das man mit 54 Pins nicht lösen kann.



